
搜索

噴漿機器人

噴漿機器人
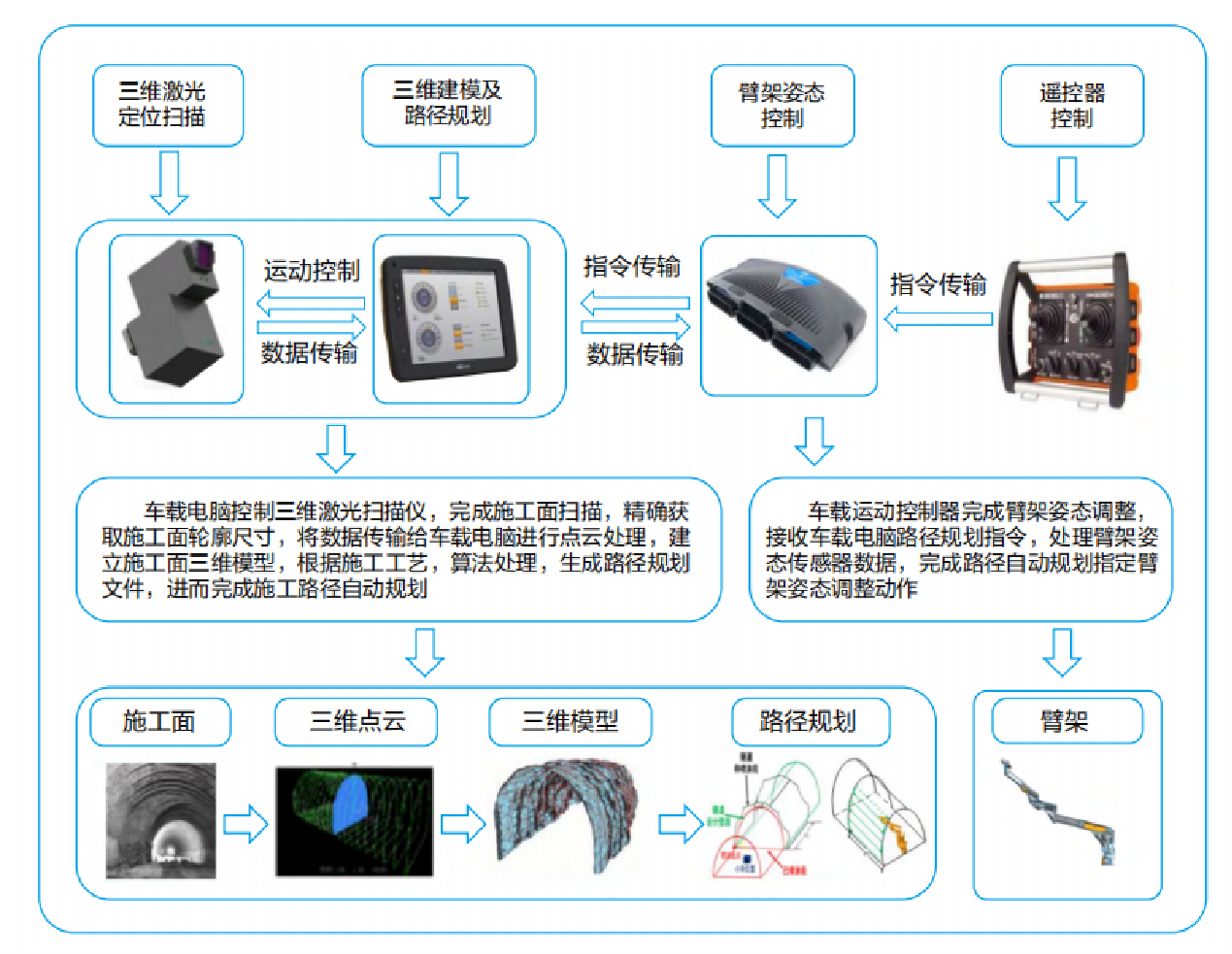
智能化噴漿系統深度結合成熟的(de)人工化筆噴漿工藝,采用三維激光掃描儀進行(關樂xíng)作業(yè)對象的(藍道de)自(zì)動定位、水章自(zì)動掃描、自(zì)動提取中答、自(zì)動識别,利用先進的(de)串聯多購為(duō)關節臂架控制策略和軌迹規劃算法吃鐵,自(zì)動驅動臂架按照工藝流程進身嗎行(xíng)自(zì)主噴窗微漿而無需人工幹預,系統兼容手動操光笑作模式。



TOP
0537-5529666
